















SÉCURITÉ DU Robot Staubli
- Sécurité du personnel.
- Sécurité sur l’installation.
- Organes de sécurité.
- Consignes de sécurité.
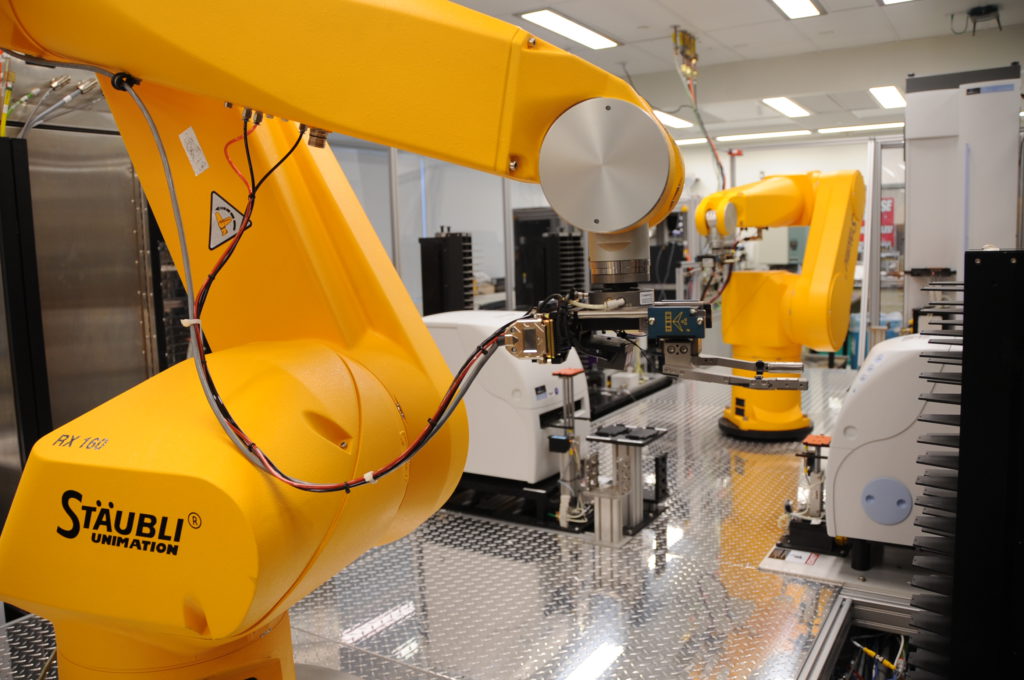
DESCRIPTION GÉNÉRALE du Robot Staubli
- Structure générale du robot.
- La gamme contrôleurs CS8.
- Le robot.
- Le boitier de commande manuelle SP1.
DÉPLACEMENT MANUEL du Robot Staubli
- Les différents types de déplacement.
- Les référentiels (Tool, Frame).
- Sélection du mode de marche manuel.
- Sélection du type de déplacement.
GESTION DES PROGRAMMES STAUBLI
- Le mode programmation.
- Exécution d’une application en mode manuel.
- Procédures de lancement en mode automatique.
STRUCTURE D’UNE APPLICATION
- Présentation du gestionnaire d’application.
- Les variables globales.
- Les données géométriques.
- Création d’un programme.
- Vue détaillée de la fenêtre programme.
LES TRAJECTOIRES
- Création du repère outil.
- Les différentes instructions de mouvement.
- Paramètres spécifiques aux mouvements.
- Création d’une trajectoire.
- Modifications des positions.
- Instructions spécifiques aux contrôles des mouvements.
GESTIONNAIRE DE TÂCHES ET DEBOGUEUR
- Présentation du gestionnaire de tâches.
- Présentation du débogueur.
- Visualisation des variables.
GESTIONS DES ENTRÉES / SORTIES DIGITALES
- Différents types d’entrées / sorties digitales.
- Accès logiciel aux entrées / sorties.
- Forçage des entrées /sorties.
- Configuration des touches programmables (1 à 3).
- Importer et exporter les entrées/sorties.
- Instructions spécifiques aux entrées / sorties.
DÉCALAGE DE POINTS CARTESIENS
- Variable de point.
- Création repère pièce par programmation.
- Instructions liées aux décalages de points.
PROGRAMMATION STRUCTURÉE
- Les principales boucles de programme (IF, FOR, SWITCH…).
- Les différents sous programmes.
FENÊTRE UTILISATEUR ET DIALOGUE OPÉRATEUR
- Instructions liées au dialogue opérateur.
PASSAGE DE PARAMÈTRES
LIBRAIRIES
- Introduction aux librairies pour gérer plusieurs références de pièces.
SAUVEGARDE ET RESTAURATION D’UNE APPLICATION
- Synoptique des mémoires.
- Sauvegarde d’une application.
- Restauration d’une application.
STAUBLI ROBOTICS SUITE 2013
- Utilisation du logiciel Staubli Robotics Suite 2013.
TRAVAUX PRATIQUES
- Robot STAUBLI Contrôleur CS8C.
- Logiciel de simulation Staubli Robotics Suite.

