















Formation KUKA compatible avec les robots : KR 1000 TITAN / KR 360 FORTEC / KR 500 FORTEC / KR 600 FORTEC / KR QUANTEC / Nano QUANTEC / Press QUANTEC / PA QUANTEC / KR 700 PA / KR 40 PA / KR IONTEC KR 20 R3100 & KR 30 R2100 & KR 50 R2100 & KR 50 R2500/ KR CYBERTEC KR 8 R2010-2 & KR 12 R1810-2 & KR 16 R1610-2 & KR 16 R2010-2 & KR 20 R1810-2 / KR CYBERTEC Nano : KR 6 R1840-2 & KR 6 R1820 & KR 8 R1640-2 & KR 8 R1620/ KR 3 D1200 HM / KR 3 R540 / KR 4 R600 / DCARA : KR 6 R500 Z200 & KR 6 R700 Z200 / AGILUS KR 6 R700-2 & KR 6 R900-2 / LBR iiwa 7 R800 / LBR iiwa 7 R800 CR / LBR iiwa 14 R820 / ARC KR 8 R1420 & KR 8 R1440-2 & KR 8 R1620 / ARC KR 8 R2100 / KR 40 PA
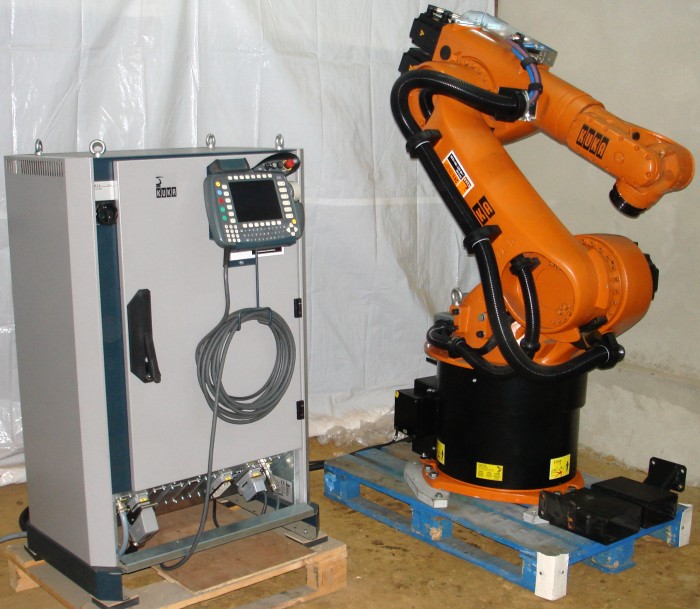
ÉLÉMENTS DE CONDUITE du Robot KUKA KRC4
- Rappel sur la sécurité.
- Description générale.
- Les différents types de déplacement (Cartésien, axe par axe …).
- Déplacement manuel du robot.
- Rappel sur l’exécution d’un programme.
TOPOLOGIE DE LA BAIE KRC4 (KUKA)
- Désignation et implantation des différents éléments.
- Présentations des différents bus (KCB, KLI, KCB, KEB).
- Principe de la boucle d’asservissement.
- Etudes des schémas électriques.
LES ÉLÉMENTS DE DIAGNOSTIC
- Signification des messages envoyés par le système.
- Etat des différentes Leds.
REMPLACEMENT DES DIFFÉRENTS ÉLÉMENTS
- Procédures de remplacement des modules liés aux systèmes d’entrainements (KPP, KPS, RDC…).
- Procédure de remplacement du calculateur et du disque dur.
LA CHAINE DE SÉCURITÉ
- Présentation de la Safety Interface Board « SIB ».
- Remplacement de la SIB.
- Signification des entrées/sorties sûres.
LES DIFFÉRENTES SAUVEGARDES
- Sauvegarde et restauration image Kuka avec le logiciel KRC System Recovery.
- Sauvegarde et restauration globale utilisateur.
VISUALISATION ET MODIFICATION DES VARIABLES
LE SYSTÈME DE MESURE
- Présentation de la mémoire « EDS ».
- Introduction à la calibration.
- Calibration à l’EMD (standard ou avec offset).
- Calibration de Référence.
LE LOGICIEL WORKVISUAL
- Présentation du logiciel WorkVisual.
- Téléchargement du Projet du robot.
- Effectuer un diagnostic avec le logiciel Workvisual.
- Aperçu des autres possibilités de Workvisual.
ANNEXES
- Le test des freins.
- Les différents modes d’arrêts.
ENTRAINEMENT AU DIAGNOSTIC DE PANNE
TRAVAUX PRATIQUES
- Sur Robot KUKA KRC4

